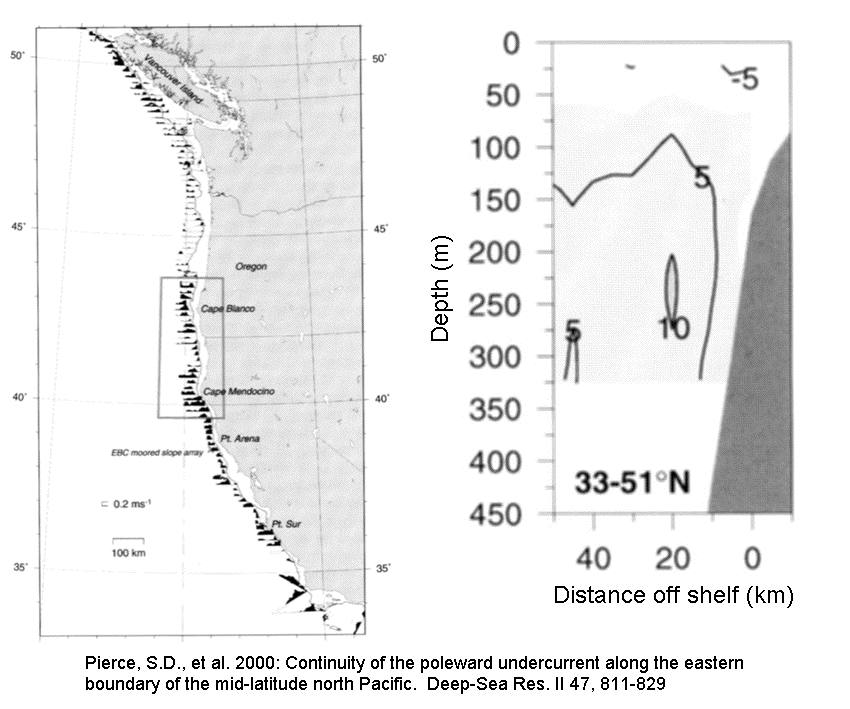
The California Current system is best known off the
west coast of North America where a broad southward flow characterizes
the shallow flow. In the northern portion, the surface flow is northward,
joining the Alaska Gyre. In these figures we see results from 105 velocity
sections. Averaged from 75m to 325m, after removing tidal currents, the
figure shows a persistent northward flow all along the section. Averaged
from 33N to 51N relative to the local coast, the right panel shows shows
a crossection of northward flow, averaging more than 10 cm/s in a depth
range 200m to 250m. Individual deep mooring show that the northward flow
is persistent to depths greater than 1000m.